專題實作|專題成果
110年
The Electrical Engineering department
The
Electrical Engineering
department
游仁德
陳逸
陳韋誠 趙冠程
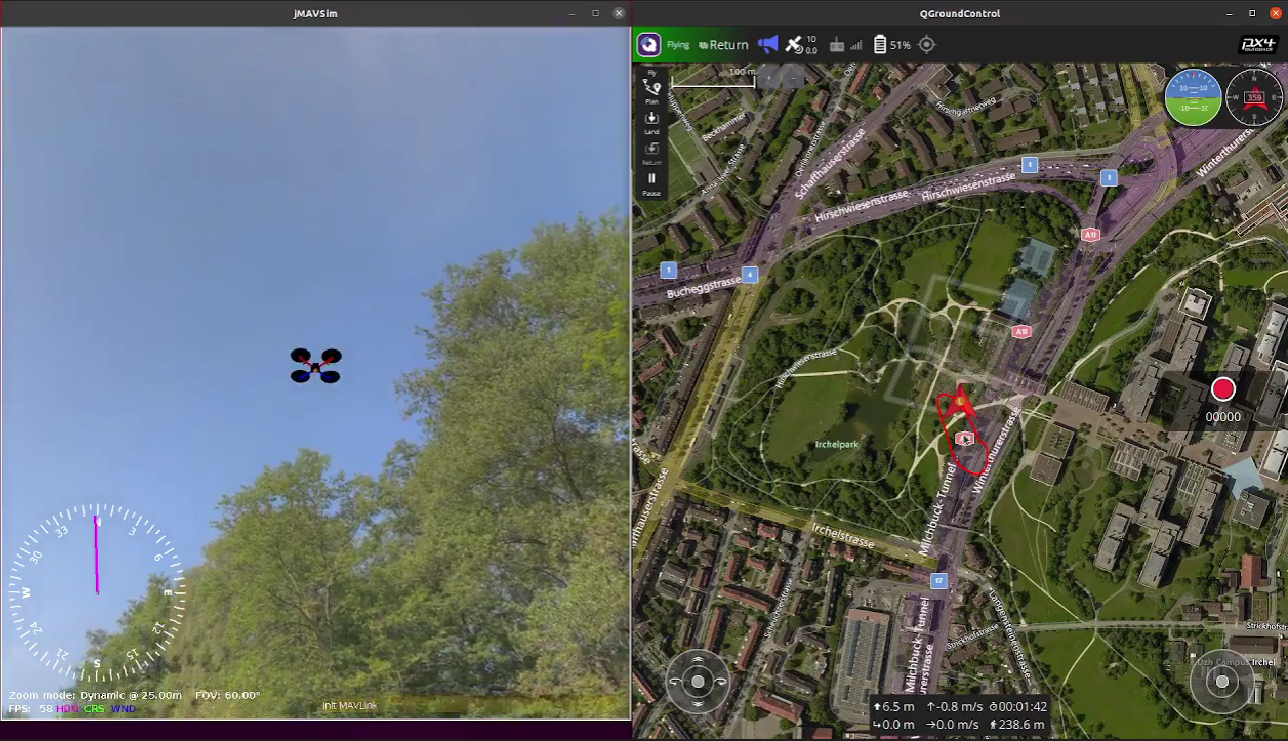
剛體姿態控制是由涉及姿態機動或姿態穩定的航空航天應用驅動的。剛體的姿態集合是行列式為 1 的 3 X 3 正交矩陣的集合。該集合為剛體姿態運動的構型空間;然而,這個配置空間不是歐幾里得的。由於姿態集合不是歐幾里得空間,姿態控制通常使用各種姿態參數化來研究。出於剛體旋轉運動在分析中全局和獨特地表示理想姿態,本文專門使用正交矩陣來表示姿態並開發剛體姿態控制的結果。使用正交矩陣的一個優點是這些控制結果,包括使用連續反饋控制的開環姿態控制機動和穩定,不需要重新解釋被視為正交矩陣的姿態集。主要目的是展示如何在不使用姿態參數化的情況下表現任意姿態機動的姿態控制系統之特軟體PX4模擬姿態飛行,達成理想的飛行狀態。